
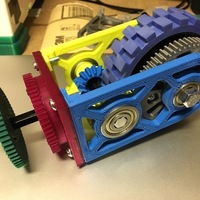


Summary A 3d printed swerve module. The drive axle is a 3/8" bolt. All hex shaft is 3/8" hex.
This was designed to interface with Vex Robotics motors. This allows users to teach about swerve concepts at a fraction of the cost of a FRC sized robot and control system.
It utilizes 4" wheels.
Bill of Materials (Per Module): 2 Side Panels 1 Top Plate 1 Top Spacer 1 Vex to Hex Gear 1 60T Vex Gear 2 Bevel Gears 1 30T Gear 1 54T Wheel Gear 1 Drive Shaft Spacer 1 Drive Axle (0.375" Hex, Minimum Length: 2.5") 1 Bevel Axle (0.375" Hex, Length: 3.125") 4 FR6ZZL-hex Bearing 4 3/8" id Flanged, Shielded Ball Bearing (FR6ZZ) 1 3/8" Bolt 1 3/8" Luck Nut 16 #10-24 screws (10 minimum, 16 if every mounting point is used) 4 #10-24 nuts 1 4" Wheel (I used the 4" HiGrip Wheel, available from AndyMark)
The base plate is good for adding visual appeal to a robot, but currently lacks enough structural stability to function as a sole mounting point for the swerve modules if printed. The spacing however is correct for all motors and gears, so I can also be used as a template for working on other materials.
Rafts and supports are not required. I used 0.2mm layer height. Infill: Varies depending on the part, generally, values above 20% are sufficient.
Loading prints...
Coaxial Swerve Module
Creative Commons Attribution
You can distribute, remix, adapt, and build upon the material in any medium or format, as long as attribution is given to the creator.
 Licensed under CC BY
Licensed under CC BY




Loading comments...