



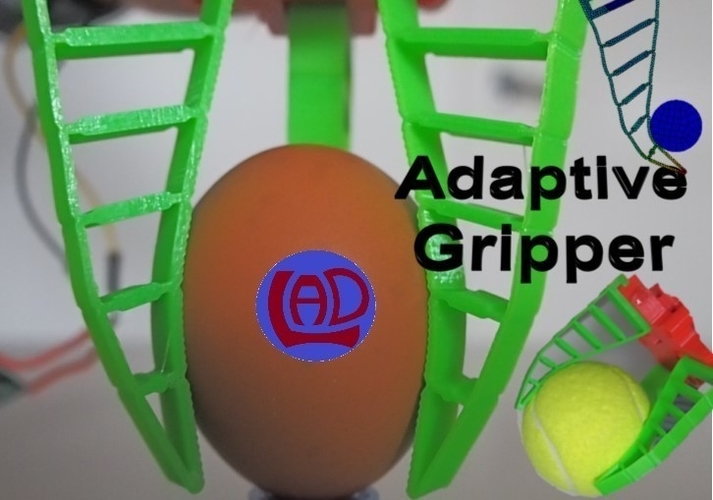
This is an improved version of my original Adaptive Gripper, with a greater gripping force that allows this gadget to lift up to 500gr (the equivalent of a mid size cup full of water). This new design has also a wrist joint, which rotates 180 degrees .
The Arduino code is also included with the STL files.
-------------------------
NOTE: I did not mention this on the video, but you need to connect two 10kohms resistors, one between ch7 and GND, and the other one between ch8 and GND, of your Arduino board, for the limit switches to work properly with the code.
--------------------
You need to print one of each STL file, with the exception of the flexible green fingers (ADAPTIVE FINGER V1.1.stl), which you need 3 pcs.
NONE OF THE PARTS NEED SUPPORT. MUST TURN OFF SUPPORTS ON YOUR SLICER.
All parts are printed in hard material with the exception of the Green finger or "ADAPTIVE FINGER v1.1.stl" which is of flexible material ( TPU 92 shore A). I have printed this one on my Ender 3, which has a Bowden tube. You need to use the following settings to successfully print flexible material on a Bowden Tube machine.
The printing Settings of TPU flexible material are:
*Print *speed of 20mm/sec. *Retractions need to be turned OFF. *In CURA, under TRAVEL", set the "COMBINE MODE" to ALL, which will make the nozzle to travel inside the printed part only.
This gripper is fully compatible with the LAD Robotic Torso
3D Printed HUMANOID TORSO-3D printed-Arduino code included by Adrian_Duran | Pinshape
FOR INSTALLATION INSTRUCTIONS REFER TO TEH FOLLOWING VIDEO
Loading prints...
ADAPTIVE GRIPPER-IMPROVED VERSION WITH ARDUINO CODE
Creative Commons Public Domain
The creator has waived all rights to the work. You can copy, modify, distribute and perform the work, even for commercial purposes, without asking permission.
 Licensed under CC0
Licensed under CC0



Loading comments...